飛行船ロボットが自律飛行と相撲で競う ―― 第5回 MDDロボットチャレンジ
2008年10月29日,国立オリンピック記念青少年総合センター(東京都渋谷区)にて,飛行船の自律制御を課題としたロボット・コンテスト「第5回 MDDロボットチャレンジ」が開催された(写真1).今回は初めての試みとして,自律飛行競技のほかに手動制御による相撲競技が行われ,会場は大いに盛り上がった.

[写真1] MDDロボットチャレンジ
国立オリンピック記念青少年総合センター(東京都渋谷区)にて行われた.
本コンテストは,情報処理学会 組込みシステム研究会が主催する学会「組み込みシステムシンポジウム 2008(ESS2008)」の特別企画として開催された.
●思うようにいかない自律飛行競技
MDDロボットチャレンジは,その名の通り,MDD(Model-Driven Development;モデル駆動開発)による組み込みシステム開発の成果を競うものである.課題は,モータや角速度センサ,無線通信モジュール,超音波発信装置などを搭載した飛行船の自律制御である(図1).
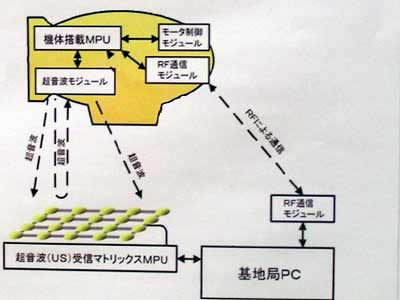
[図1] 飛行船制御システム
飛行船は複数のプロペラを備えており,それらをモータで制御することによって,上昇,下降,旋回などの動作を実現する.
飛行船は,所定のスタート地点から離陸し,定められた立ち寄り点(ウェイ・ポイント.2点設定されている)の付近を通り,着陸する(写真2).飛行領域の床面には超音波センサがマトリックス状に配置されており,それによって飛行船の位置を検知する.基地局(パソコン)は,超音波マトリックス・システムから得た情報と飛行船の無線通信モジュールから得た情報を基に,飛行船に対して制御命令を発信する.参加チームは,基地局のプログラムと,飛行船の機体に搭載されるマイコンのプログラムを開発する.飛行船は標準機として提供されているものをそのまま使用してもよいし,独自に開発してもかまわない.

[写真2] 飛行領域
正面奥のサボテンのあたりがスタート地点,飛行領域内に浮いているピンクと水色の風船が立ち寄り点(ウェイ・ポイント)である.着陸地点のめやすとしてクレータが置いてあるが,どの地点でも着陸できれば着陸ポイントが得られる(クレータ内に着陸できれば追加ポイントが得られる).床面を這っているのはマトリックス状に配置された超音波センサ.
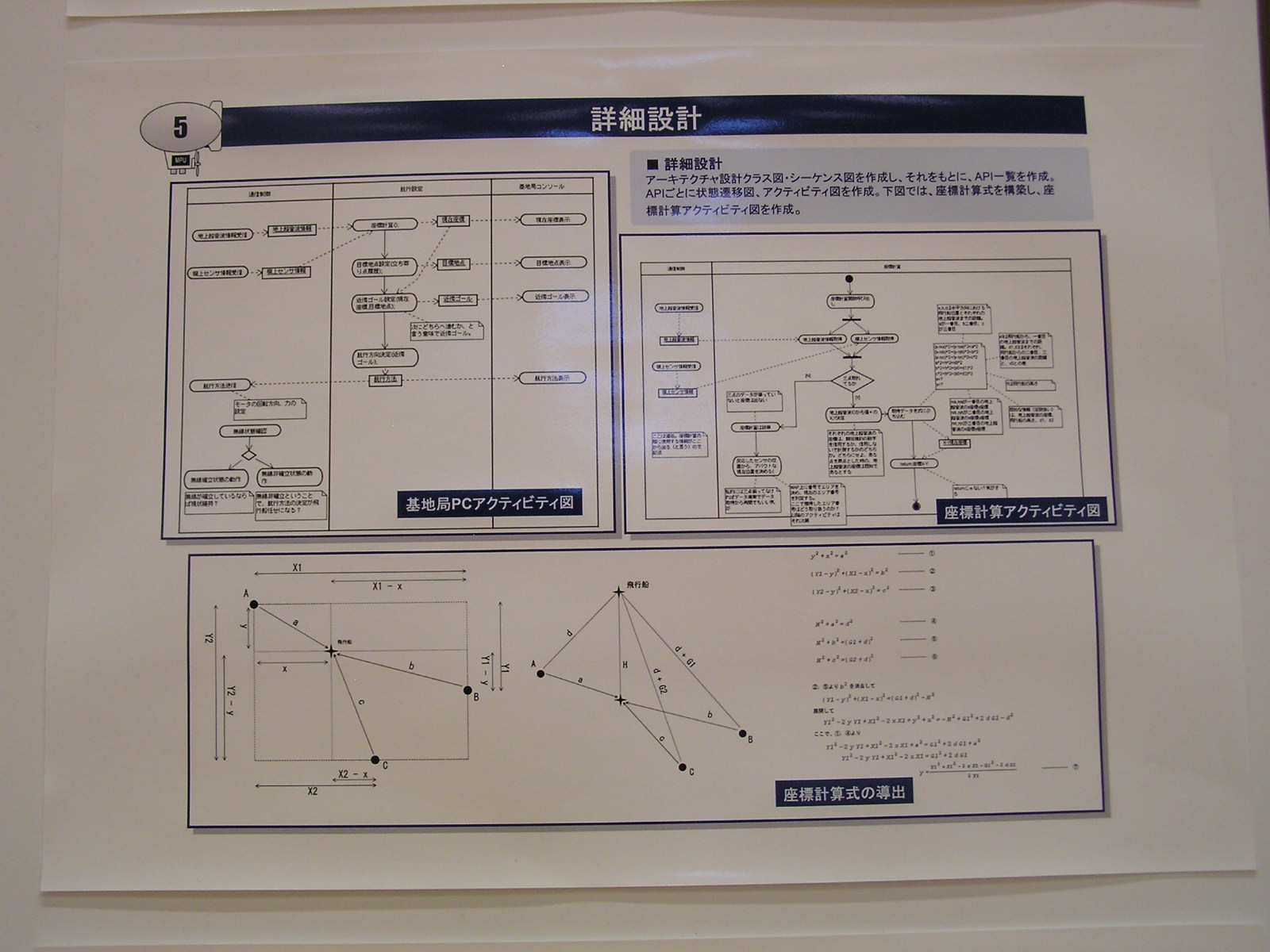
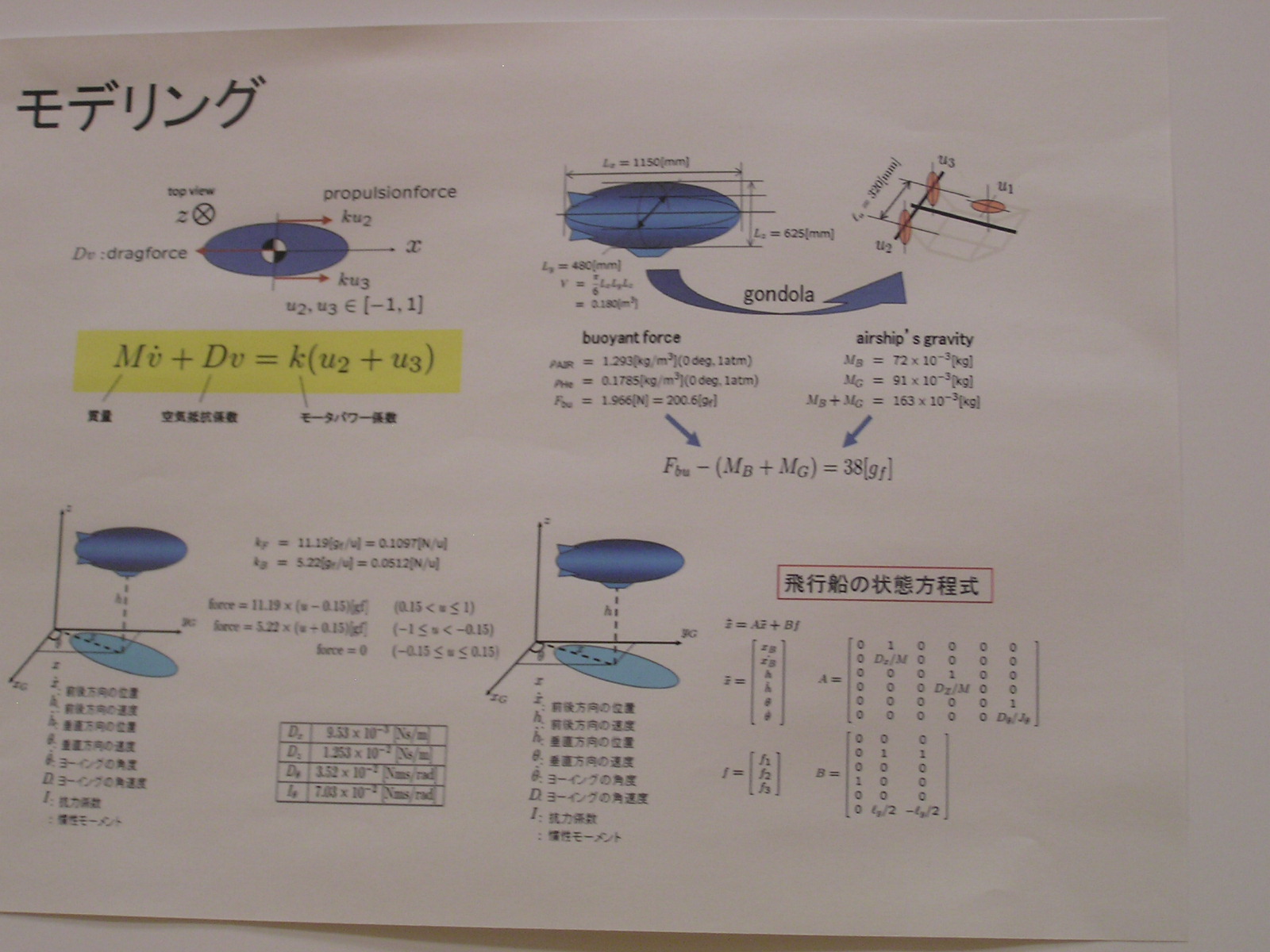
各チームは,高度制御や方位のキャリブレーション,自身の位置を見失ったときの復帰の方法など,さまざまな点を考慮して緻密なモデルを作成していた(図2,図3,図4).しかし,本番の航行では,機体の上昇する程度が練習のときと異なる,方位や高度がうまく取れない,などのハプニングが続出した.その中で,チーム「京魂英雄(ヒューマンエンジニアリングアンドロボティックス,京都情報大学院大学,京都コンピュータ学院の合同チーム)」は,離陸,立ち寄り点1,立ち寄り点2,着陸のそれぞれでポイントを獲得し,優勝した.
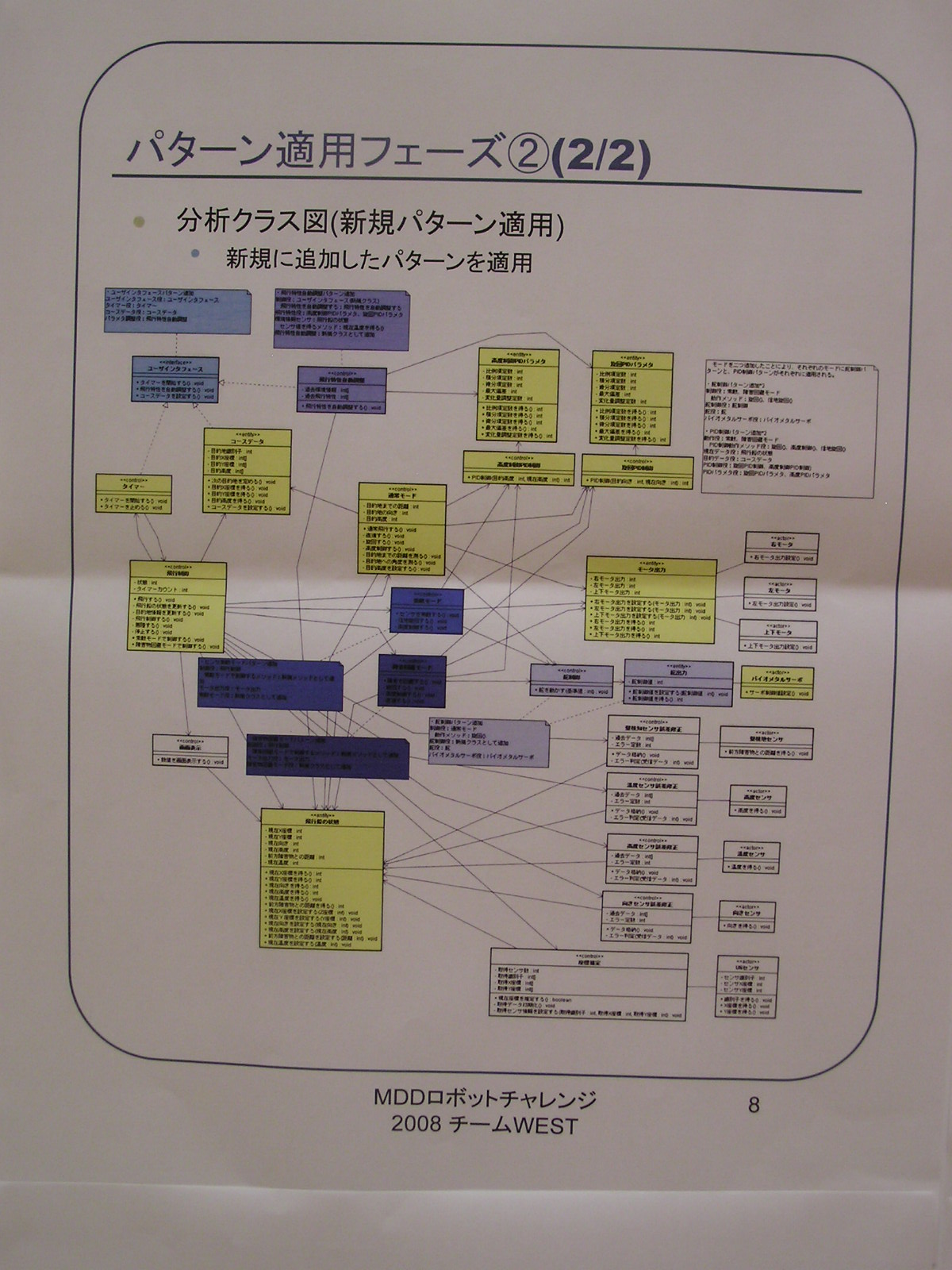
[図2] チーム「WEST(和歌山大学,徳島大学,アーツテックラボの合同チーム)」の分析クラス図(クリックすると拡大)
WESTは,これまでのMDDロボットチャレンジに出場したチームの設計モデルを参照してパターンを抽出し,それを改良したモデルを作成した.
[図3] チーム「ふわっと(東海大学,武蔵工業大学の合同チーム)」の設計モデル(クリックすると拡大)
このチームは,C言語を拡張して状態遷移形式の記述を追加したオリジナル言語「組み込みプログラミング言語」を開発した.また,状態遷移図からこのオリジナル言語などのコードを半自動生成するツールも開発した.なお,このチームは本番では方位がうまく取得できずに失敗したが,評価外となる3回目の挑戦で見事な飛行を見せた(動画はこちら).
[図4] チーム「Bears Union(熊本大学大学院)」のモデル(クリックすると拡大)
●技で魅せた相撲競技
思うように飛んでくれない自律飛行のうっぷんを晴らすかのように,手動制御による相撲競技がトーナメント方式で行われた(写真3).相撲競技は1対1で行う.それぞれの飛行船が後部に長いリボンを付けて,相手のリボンに先に触った飛行船が勝ちとなる.なお,勝負開始の離陸後は,リボンを含めた機体が周囲の壁や床に接触すると負けとなる.試合時間は5分.

[写真3] 相撲競技の様子
チーム「ふわっと」(写真左) vs チーム「WEST」(写真右)の準決勝.がっぷり四つに組んだ名勝負(動画はこちら).制限時間の5分間では勝負がつかなかったが,どちらかというと終始低い位置を保ちつつ攻めの姿勢を見せていた,ということで「WEST」が決勝に進出した.
勝負の戦略は各チームさまざまで,重量級の機体を相手にぶつけていく飛行船,スマートに相手をかわして下に回り込もうとする飛行船,のらりくらりと飛行して相手のミスを誘う飛行船などがあり,会場は大いに盛り上がった.相撲競技の制御コントローラは各チームで準備した.マウスやキーボードで操作するチーム,ゲームのコントローラやジョイスティックを使うチーム,自作コントローラで挑んだチームなどがあった.コントローラによる遠隔操作は,各チームとも見事なものだった.優勝したのはチーム「WEST」.重量級の機体とうなりをあげるモータ音は,さながら横綱の貫禄だった.
参考・引用*文献
(1)MDDロボットチャレンジ2008実行委員会;MDDロボットチャレンジ 競技仕様書,2008年4月23日.
関連リンク
(1)レポート:取り組み広がる飛行船ロボット教育(第4回 MDDロボットチャレンジ)
(2)写真館:第4回 MDDロボットチャレンジ
(3)写真館:第3回 MDDロボットチャレンジ
(4)写真館:第2回 MDDロボットチャレンジ
(5)レポート:MDD(モデル駆動開発)で模型飛行船を制御する(第1回 MDDロボットチャレンジ)
(6)写真館:第1回 MDDロボットチャレンジ


