FlexRayやIDB-1394など,次世代車載LAN対応デバイスが続々製品化 ――人とくるまのテクノロジー展2006
2006年5月24日~26日,パシフィコ横浜(神奈川県横浜市)にて,自動車技術に関する展示会「人とくるまのテクノロジー展2006」が開催された(写真1).FlexRayやIDB-1394など,次世代の車載LANとして注目されているプロトコル規格に対応したデバイスが製品化されており,それに関連したデモンストレーションや展示が数多く行われた.例えば,富士通は情報系車載LAN規格の一つであるIDB-1394に対応した通信コントローラのデモンストレーションを行った.
[写真1] 人とくるまのテクノロジー展2006
2006年5月24日~26日の3日間における来場者数は57,671名.昨年の45,781名を大きく上回った.
●IDB-1394など,情報系車載LANのデモンストレーションを実施
富士通は,情報系の車載LAN規格であるIDB-1394に対応した通信コントローラ「MB88387」のデモンストレーションを行った(写真2).デモンストレーションでは,本コントローラに安川情報システムの1394プロトコル・スタックを実装し,ビデオ・データの送受信を行った.本コントローラには,400Mbpsのデータ転送速度に対応した物理層およびリンク層の回路が組み込まれている.電源電圧は,内部電圧が1.8V,I/O電圧が3.3V.動作温度範囲は-40℃~+85℃.パッケージは176ピンのLQFP.
また同社は,現在,ビデオCODECを内蔵したIDB-1394用通信コントローラを開発している.2006年夏ごろからのサンプル出荷を予定している.ビデオCODECについては同社独自のフォーマットを採用しており,圧縮率は1/3固定.例えば,解像度が800×480画素(60フレーム/s),18ビットRGBのナビゲーション映像を138Mbps(=512Mbps÷3)で転送できる.これにより,IDB-1394の帯域(400Mbps)を用いて伝送することが可能となっている.エンコード/デコードにかかる時間は2ms~3ms程度という.

(a) デモンストレーションのようす
(b) MB88387を搭載したボード
[写真2] IDB-1394通信コントローラのデモンストレーション
MB88387にはビデオCODECが内蔵されていないため,別途,エンコーダ/デコーダ用のボードが必要になる.IDB-1394は,デイジ・チェーンやスター型,ループ型などのトポロジに対応する.本デモンストレーションではループ型トポロジをとっていた.
また,村田製作所は,光ファイバ用トランシーバ(FOT:fiber optical transceiver)モジュールを展示した(写真3).最大1Gbpsの伝送速度に対応するという.送信モジュールにはVCSEL(vertical cavity surface emitting laser;面発光レーザ)とドライバが,受信モジュールにはフォト・ダイオードとレシーバが内蔵されている.本モジュールは,PCS(polymer-clad silica;コアが石えいの光ファイバ)に対応している.
MOST(Media Oriented Systems Transport)やIDB-1394などの高速なデータ処理が必要な情報系車載LANなどへ応用できる.製品化の時期は未定.
[写真3] 光ファイバ用トランシーバ
ナビゲーション・システムやAV機器,インターネットなどの情報系の車載LANへの応用が考えられる.
●FlexRay対応マイコンによるネットワーク通信を披露
フィリップス エレクトロニクス ジャパンとフリースケール・セミコンダクタ・ジャパンのブースでは,それぞれのFlexRay通信コントローラを用いたデモンストレーションが行われた.オランダRoyal Philips Electronics社と米国Freescale Semiconductor社はFlexRayについて技術協力を行っている.例えば,Philips社のFlexRay通信対応の32ビット・マイコン「SJA2510」には,Freescale社と共同開発したFlexRay通信コントローラ回路が搭載されている.FlexRayのプロトコル仕様バージョン2.1に対応している(写真4).
(a) デモンストレーションのようす
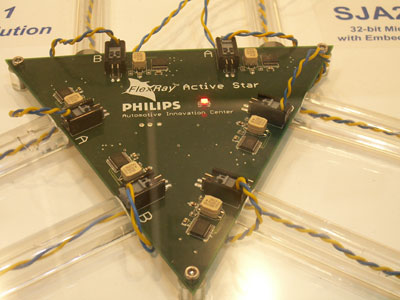
(b) スター・カプラ
[写真4] 「SJA2510」のデモンストレーション
本マイコンのFlexRay通信コントローラの部分はPhilips社とFreescale社が共同開発した.本マイコンは,CPUコアとしてARM9を採用している.
フリースケールは,2006年5月にサンプル出荷を開始した32ビット・マイコン「MPC5567」のデモンストレーションを行った(写真5).本マイコンは,FlexRay 2.1に対応した通信コントローラ回路のほか,PowerPCコア(e200z6)を内蔵している.動作周波数は最大132MHz.デモンストレーションでは,MPC5567,FlexRay通信対応の16ビット・マイコン「MC9S12XFR128(CPUコアはHCS12X)」,FlexRay通信コントローラ「MFR4300」のそれぞれを搭載したノードをスター・カプラを介して通信させていた.
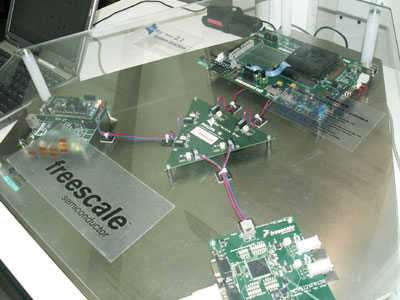
[写真5] 「MPC5567」のデモンストレーション
「MPC5567」は,PowerPCコアとFlexRay通信コントローラ回路を1チップに集積している.
スター・カプラはノード間の伝送距離を延長する際に使われるもので,FlexRay対応トランシーバが搭載されている.両社のデモンストレーションでは,Philips社のFlexRay 2.1準拠トランシーバIC「TJA1080」を用いた.TJA1080にはスター・カプラ用の論理回路が内蔵されている.ノードのトランシーバとして用いる場合,制御ピンの電圧レベルによってこの回路を無効にする.
今後Philips社は,ノード専用トランシーバIC「TJA1082」とスター・カプラ専用トランシーバIC「TJA1085」を開発していく.TJA1082は,スター・カプラ用論理回路を必要としないため,TJA1080と比べて小型になる.また,TJA1085は一つのチップで4チャネルに対応する予定.
●車載向けのMEMSセンサやカメラも数多く展示
ベルギーのMelexis Microelectrionic Integrated Systems社は,分解能が0.1deg/sのMEMSジャイロセンサ「MLX90609」のデモンストレーションを行った(写真6).ディープ・トレンチ構造をとる独自のMEMSプロセスで製造する(製造はドイツX-FAB Semiconductor Foundries社が担当).エッチングを深くすることで,センシングを行う「くし歯」構造の電極部分の面積を広げた.これにより,測定する静電容量の変位量が大きくなり,測定感度が上がる.ノイズ密度は0.026deg/s/√Hz..
動作温度範囲は-40℃~+85℃.帯域は5Hz~70Hzの間で可変.センサ・チップと信号処理用ASICを1パッケージに封止している.パッケージの外形寸法は10mm×10mm×2mm.
本ジャイロセンサは,カー・ナビゲーション・システムの方角の算出などに用いられる.自動車の振動による測定誤差を防ぐため,z軸方向の信号をキャンセルする機能を搭載している.現在,サンプル出荷中.量産出荷は2006年第3四半期から開始する予定.
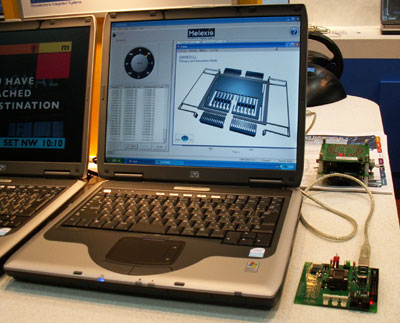
(a) デモンストレーションのようす
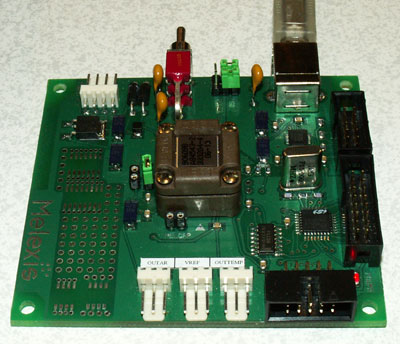
(b) 「MLX90609」評価ボード
角速度を積分し,方向を算出するというデモンストレーションを行った.
また,村田製作所もカー・ナビゲーション・システム向けMEMSジャイロセンサ「MEV-50A-R」を展示した(写真7).自社のMEMS製造プロセスを用いている.従来,同社のジャイロセンサにはセラミックス製の圧力素子を用いていたが,MEMSプロセスを用いることで温度特性の向上や小型化を図った.展示されていたMEMSジャイロセンサの外形寸法は10mm×10mm×3.3mm.温度特性は20mV/deg/s.検出範囲は±70deg/s.現在,サンプル出荷中.
[写真7] MEMSジャイロセンサ「MEV-50A-R」
外形寸法は10mm×10mm×3.3mm.
住友電気工業のブースでは,広視野角のフロント・カメラのデモンストレーションが行われた(写真8).本カメラの視野角は190°.自動車の先頭に取り付けて,見通しの悪い交差点などで左右の状況を把握できる.2006年1月にフル・モデル・チェンジしたトヨタ自動車の「エスティマ」に採用されている.

(a) デモンストレーションのようす


(b) 本フロント・カメラが搭載されている自動車
[写真8] 広視野角フロント・カメラのデモンストレーション
本フロント・カメラは,視野角が190°と広い.エスティマのメーカ・オプションとしてHDDナビゲーション・システムとセットで取り付けられる.(b)の自動車は,トヨタ車体のブースに展示されていたもの.
同社の従来の左右監視用フロント・カメラは,光学レンズとCCDカメラを組み合わせたもので,視野角は左右それぞれ40°程度であり,進行方向や下方などの映像は取り込まれなかった(写真9).今回開発したカメラは左右の視野角を広げるだけでなく,進行方向の映像も途切れることなく,一つの映像として見ることができる.また,通常の魚眼レンズでは画面端の映像が小さく見えてしまうが,本カメラではできるだけ大きく見えるように光学系にくふうを施したという.

(a) 従来カメラ(写真左)と今回のカメラ(写真右)

(b) 従来カメラを用いたモニタ画面(2004年に開催されたConvergence 2004で撮影したもの)

(c) 今回のカメラを用いたモニタ画面
[写真9] 従来品との比較
今回開発したフロント・カメラでは,左右,進行方向の映像を切れ目なくモニタできる.


