三菱自動車,Drive-by-wireを2010年に導入へ ――第39回東京モーターショー
2005年10月22日~11月6日の期間,乗用車・二輪車に関する展示会「第39回東京モーターショー」が日本コンベンションセンター(幕張メッセ,千葉県千葉市)にて開催されている(写真1).自動車メーカや電装機器メーカが数年後の実用化を目ざした技術を数多く展示している(写真2).例えば三菱自動車は,四つの車輪を電気的に制御する,いわゆるDrive-by-wire技術を用いた電気自動車「ランサーエボリューションMIEV」を展示し,注目を集めた.
[写真1] 第39回東京モーターショー
2005年10月22日~11月6日の期間,日本コンベンションセンター(幕張メッセ)にて「第39回東京モーターショー」が開催されている.

(a) GT-R PROTO(フロント)

(b) GT-R PROTO(バック)
[写真2] 各自動車メーカがコンセプト・カーを展示
写真は日産自動車のコンセプト・カー「GT-R PROTO」.ツーリング・カーとして人気の高かった「スカイランGT-R」は2002年8月に生産を終了した.同社の説明員によると,スカイラインのラインナップに入るかどうかは未定だが,2007年ごろに新型GT-Rを発表するという.
●三菱自動車,電気自動車でDrive-by-wireを実現
三菱自動車は,「MIEV」という技術を採用したコンセプト・カー「ランサーエボリューションMIEV」を展示した(写真3).ランサーエボリューションMIEVは4輪駆動の電気自動車である.容量が95Ahのリチウム・イオン電池を搭載している.
MIEVは,ホイールにモータを内蔵し,四つの車輪を個々に電気的に制御する,いわゆるDrive-by-wire技術を用いる.各車輪にはモータとモータ・コントローラが内蔵されている.メインECU(電子制御ユニット)は,アクセルや変速機,ブレーキの情報をもとにそれぞれのモータに適したトルクを算出する.そのデータをモータ・コントローラに送り,モータに流す電流を調整している.
同社は,2006年に軽自動車「i(アイ)」を発売する(写真4).同社の説明員によると,2010年までに電気自動車版のiを開発し,後輪にモータを組み込みたいという.4輪のすべてにモータを内蔵した電気自動車は,2010年以降に発売する予定.MIEVを採用した電気自動車の最大出力は,4輪すべてを駆動した場合,200kW(270馬力)になるという.ちなみに,現在のガソリン・エンジンを搭載した4輪駆動の「ランサーエボリューションIX」の最大出力は206kW(280馬力).

[写真3] ランサーエボリューションMIEV
三菱自動車のコンセプト・カー「ランサーエボリューションMIEV」.最大速度は180km/h,充電1回当たりの走行距離は250km(10・15モードで走行した場合).

(a) i (フロント)

(b) i (バック)
[写真4] 軽自動車「i」
2006年に発売予定の軽自動車「i(アイ)」.
なお,現在発売中のランサーエボリューションIXでは,機械的機構によって駆動トルクを配分している.この機構はトランスミッションやリファレンシャル・ギア(トルク配分機構),ドライブ・シャフト,プロペラ・シャフトなどで構成されているが,MIEVを採用すればこれらの機械的機構は不要になる.前後方向のトルクの配分はACD(Active Center Differential),左右方向のトルクの配分はSuper-AYC(Active Yaw Control)という機構で行われる.ACDとSuper-AYCは,車速やハンドル角,ブレーキ,前後左右の加速度,車輪速度,自動車の自転(ヨーレート)の情報をもとに一つのECUで制御されている.
ACDやSuper-AYCのほか,サスペンションやブレーキ,ステアリングなどを走行状態に合わせて適切に制御する機能を合わせて,同社は「S-AWC(Super-All Wheel Control)」と呼んでいる(写真5).この技術を採用したコンセプト・カー「Concept X」も展示した.2~3年後には,エンジンなども一新して市場に製品を出すという.

(a) S-AWCの模型
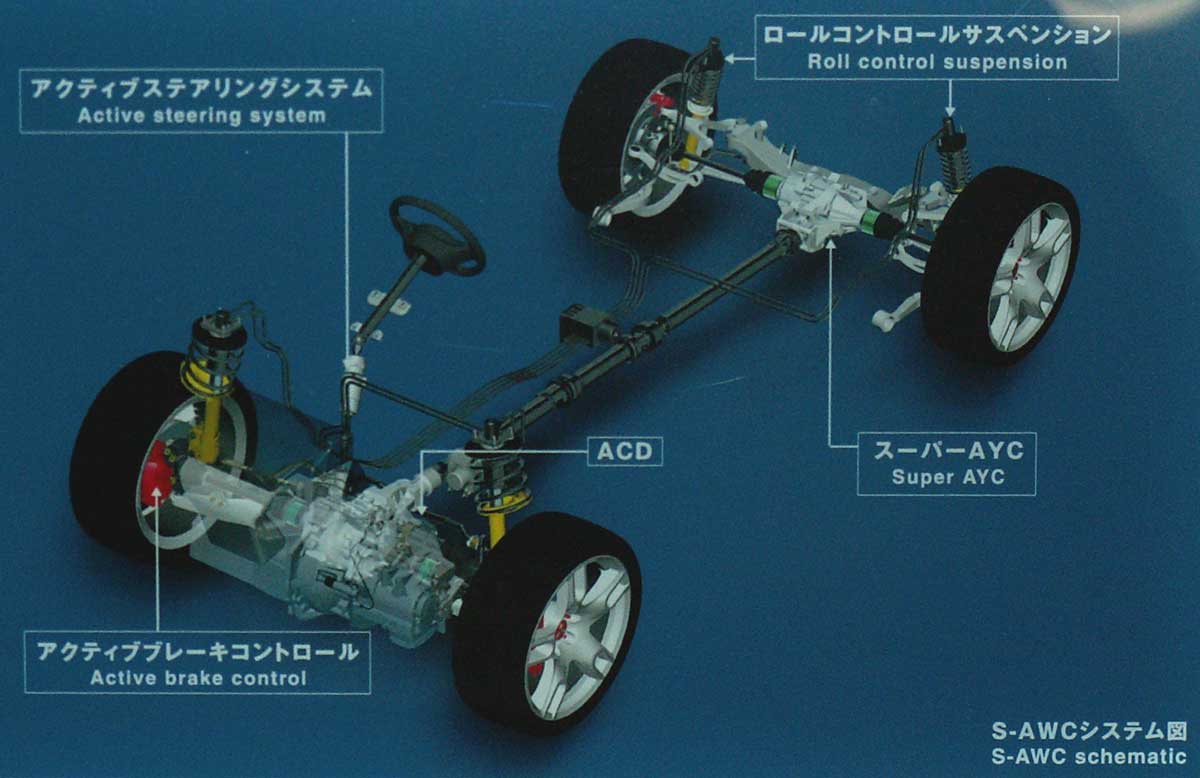
(b) S-AWCの構造
[写真5] S-AWC(画像をクリックすると拡大する)
ACDやSuper-AYCは,すでに「ランサーエボリューションIX」に搭載されている.
●三洋,後方遠方まで表示可能な鳥瞰モニタを展示
三洋電機は,後方遠方まで確認できる鳥瞰(ちょうかん)モニタ・システムのデモンストレーションを行った(写真6).本モニタ・システムは,自動車に取り付けた6個(前方に1個,左右それぞれ2個,後方に1個)のカメラ画像を合成して,自動車を上空から見たような角度で表示する.車庫入れの際などに利用する.通常,広角カメラを用いると自動車から離れたところでは画像が大きくひずむ.本モニタ・システムでは,画像を合成する際に遠方部分の変形の度合いを調整してひずみを小さく抑えた.
本展示会におけるデモンストレーションでは,画像の取り込みや合成などの処理は,Pentium 4を搭載したWindowsパソコン上のアプリケーション・ソフトウェアを使った.製品化する場合,処理量の大きいカメラ画像の取り込みには専用ASICなどを用いるという.合成などの画像処理は,モニタ・システムを搭載する車種に合わせてあらかじめ対応づけを計算できるので,それほどCPU性能は必要としないという.本モニタ・システムの商品化の時期は未定.

(a) デモンストレーション

(b) 画像合成
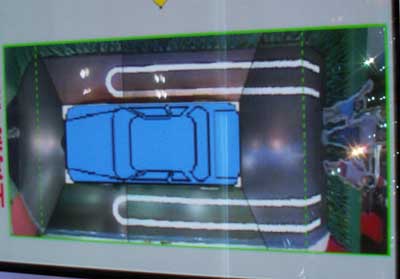
(c) 鳥瞰モニタ
[写真6] 遠方まで確認可能な鳥瞰モニタ
現在の鳥瞰モニタでは,写真(c)の緑色の点線までしか確認できないという.
●デンソー,事故防止のための運転支援システムをデモ
デンソーは,運転者の状態を検知し,事故を防止する「ドライバアシスタンスシステム」のデモンストレーションを行った.本システムは,顔認証やまばたき検出,心電波形計測などの機能を備えている.心電波形を測定する場合,ステアリングに設置してある電極を握ることで発生する微弱電流を増幅し,本システム用ECUでノイズ除去などを施してからディスプレイに表示する(写真7).例えば,通信システムと組み合わせて,取得した心電波形を主治医に転送して,健康管理を行うといった応用が考えられる.

[写真7] 心電波形表示
画面右上に10秒間の心電波形を表示している.
顔認証やまばたき検出には,計器盤(インパネ)に設置されているカメラを用いる.カメラの画像データから顔の位置を検出し,さらに目の位置,目の輪郭(まぶたの距離)を検出する.本システムは学習機能を備えており,アジア系の顔であれば約5秒で認識できる.また,そのほかの地域の顔を認識するには,1分程度かかるという.運転席の斜め前に設置された赤外線LEDを点滅させることで,サングラスをかけていても顔やまぶたを検出できる.本展示会におけるデモンストレーションでは,0.5秒間目を閉じると,ブザーを鳴らしたり頭部に風を送るなど,運転者に対して警告を出すようにしていた(写真8).
顔を認識するとき,画像データではなく,顔の陰影を数値化したデータを用いるため,メモリやCPUのリソースはそれほど必要としない.同社の説明員によると,5人分の顔データを格納するメモリは100Kバイト程度,顔認識やまばたき検出用は数百Kバイト程度という.
2010年までには商品化する方針.

(a) デモンストレーションのようす

(b) まばたき検出
[写真8] 顔認識・まばたき検出システム
カー・ナビゲーション・システムは起動に時間がかかるため,本システムとの一体化は考えていないという.心電波形などは自動車に乗ってすぐ調べられるように,例えばドアを開けた時点で本システム用ECUを起動させる.また,外部入力を利用してカー・ナビゲーション・システムのディスプレイに表示させるといった使いかたを想定している.


