商用化に向けて,万博会場で各社がロボットの技術課題を洗い出し ――2005年日本国際博覧会
2005年3月から開催されている「2005年日本国際博覧会」(通称「愛知万博」)の長久手会場にある「ロボットステーション」では,新エネルギー・産業技術総合開発機構(NEDO)の「次世代ロボット実用化プロジェクト」で募ったロボットのデモンストレーションや技術展示が行われている(写真1).本プロジェクトは,掃除ロボット,警備ロボット,接客ロボットなど,今後,市場の拡大が見込まれているロボットの試作機を開発し,愛知万博においてその技術の実証実験を行うというものである.ロボットステーションで紹介されているロボットのいくつかは,実際に会場内で案内や清掃などを行っている(写真2,写真3).来場者は実際にロボットに接して使い勝手を試すことができ,またロボットの開発メーカはユーザの意見を聞きながら,実用化のための課題の洗い出しや応用分野の模索を行っている.

[写真1] ロボットステーション
愛知万博の長久手会場「遊びと参加ゾーン」にある「ロボットステーション」では,掃除ロボット,警備ロボット,接客ロボットなどの技術展示やデモンストレーションが行われている.

(a) 音声認識中のwakamaru

(b) 案内を行うwakamaru
[写真2] 三菱重工業の接客ロボット「wakamaru」
wakamaruは約10,000語の音声フレーズを認識する能力を備えているが,ロボットステーションにおけるデモンストレーションでは「取り次ぎ」,「案内」,「終わり」などの9フレーズに限定していた(ただし,それぞれのフレーズは4ヵ国語に対応している).例えば,利用者が「案内」と発声し,案内してほしい場所(デモンストレーションでは4ヵ所に限定)を言うと,行きかたなどを音声で答えたり,その方向を指し示したりする.また,ワイヤレスLANを用いたIP電話を利用して万博スタッフなどへ電話の取り次ぎを行う機能を備えている(デモンストレーションでは,本万博のマスコットであるモリゾーやキッコロへの取り次ぎを行った).wakamaruは3時間の充電で3時間稼働する.

[写真3] 松下電工の掃除ロボット「SuiPPi」
上部に搭載された測位センサを利用して自律走行する掃除ロボット.左右前後に取り付けられた超音波センサによって障害物を回避する.測定範囲が2m程度の3次元物体センサと測定距離が8m程度のレーザ・レーダによってゴミなどを検知し,ブラシでロボット内に取り込む.本万博では,実際に閉館後,グローバル・ループ(長久手会場内にパビリオンをつなぐ回廊)や駐車場などを清掃している.
●誤差十数cmのGPSアンテナを搭載した自律走行型警備ロボット
綜合警備保障(ALSOK)は,万博会場において6体の屋外用警備ロボット「ALSOK Guard Robo i」のデモンストレーションを行っている(写真4).デモンストレーションでは,あらかじめプログラミングしておいた経路に沿って走行していたが,測定誤差が十数cmのGPSアンテナを備えており,自律走行も可能である.また,頭の部分に超音波センサやICカード・リーダが搭載されている(写真5).走行経路にRFIDタグや超音波発信器などをマーカとして設置することでさらに細かく位置を補正できる.万博会場にあるロボットのICカード・リーダはFeliCa(フェリカ)に対応していたが,例えば日立製作所のμチップなど,ほかのRFIDに対応させることも可能(写真5).

[写真4] 綜合警備保障の「Guard Robo i」とテムザックの「リグリオ」
長久手会場の「コモン5ゾーン」にあるNEDOパビリオン横の広場で行われた,警備ロボット「Guard Robo i」(写真左)と「リグリオ」(写真右)のデモンストレーション.

[写真5] Guard Robo iの頭部
頭のてっぺんの黒い半球体が超音波センサ,その前方の四角い部分がICカード・リーダ
本ロボットには,20~30個のさまざまなセンサが搭載されている(写真6).例えば,12個の火炎検知センサが取り付けられており,このセンサは炎から出る紫外線によって出火を検知する.腰回りにベルトのように配置することで,360°どの方向から出火したかを検知できるようにした.また,レーザの反射を利用してロボット周辺の人や物などの位置を検出するバンパ・センサも備えている.
このほか,カメラが10台取り付けられている.カメラで取得した映像はロボット内に保存したり,ワイヤレス通信を利用してパソコンなどに転送できる.ロボットステーションにおけるデモンストレーションでは,ワイヤレス通信として2.4GHzの周波数帯を用いるIEEE 802.11g(データ転送速度は54Mbps)を採用していた.
本ロボットはバッテリ駆動であり,1回の充電で約4時間稼働する.制御用コンピュータには,本ロボット専用のOSと制御用ソフトウェアを実装している.
今回の屋外用警備ロボットは実証実験用に多くの機能を詰め込んでいるが,商用化の際にはコストの面を考慮し,ユーザの要求仕様に合わせて機能を減らしていくという.なお,同社が開発した屋内用警備ロボットは,浜松科学館(静岡県浜松市)や福岡県福岡市内のヨドバシカメラなど,すでに3台の納入実績があるという.施設案内や身分確認などに利用されている.

[写真6] Guard Robo iのハードウェア
ロボットステーションの綜合警備保障のブースに展示されていたパネル.センサやカメラなどが多数搭載されていることがわかる.
テムザックも屋外用の警備ロボット「リグリオ」のデモンストレーションを行っている(写真7).同社は,屋内用の警備ロボットの実証実験はすでに行っているが,屋外用は今回が初めて.PHSやワイヤレスLANによる遠隔操作のほか,制御用コンピュータに格納した地図情報やGPS(精度は十数cm)を用いた自律走行も行える.ロボットの起動のみをWindows OSから制御し,その後の処理には専用のリアルタイムOSを用いている.

(a) 障害物を発見

(b) 2次元センサで物体の幅を測りながらアームを動かす
[写真7] リグリオのデモンストレーション
前方の障害物を検知して,アームで持ち上げるというデモンストレーション.持ち上げられる重量は最大40kg.アームの動作は,ロボットの前方に設置された電磁センサの情報をもとに制御する.電磁センサは2次元(物体の幅や傾きなど)を測定できる.
●子どもの言動を考慮してハード/ソフトを改良した子守りロボット
NECは2005年3月に「パーソナルロボットPaPeRo 2005」を発表した.同社のロボット開発センターが開発したもので,3000フレーズを認識し,過去の会話をもとにした学習機能を備えている.PaPeRo 2005の制御ボードはノート・パソコンのメイン・ボード並みで,動作周波数が1.6GHzのPentium-M,512Mバイトのメイン・メモリ,40Gバイトのハード・ディスク装置などを搭載している.OSはWindows.
愛知万博で実証実験を行っている「チャイルドケアロボットPaPeRo」は,子どもの相手をすることを考慮して,PaPeRo 2005にバンパ・スイッチやタッチ・センサ,超音波タグ・レシーバなどを追加した(写真8).
ロボットの前方に三つ,左右の側面に一つずつ,合計五つのバンパ・センサが搭載されている.子どもがロボットに接触すると,それを検知して車輪が停止する.タッチ・センサは頭や胴体に合計9個取り付けられている.静電容量式のセンサを用いており,接触とその強さに応じて音声を出力したり,LEDで表情を作ったりする(写真9).ロボットの前方には四つの超音波タグ・レシーバが取り付けられており,超音波タグを持った人(または物)の位置を認識する.なお,この超音波タグと同レシーバは,古河産機システムズが開発したもので,3次元超音波位置測定用モジュール「ZPS-MK」として発売されている.測定範囲は最大5m,測定誤差は20mm~100mm.リーダの大きさは500円玉程度,タグは名刺大.
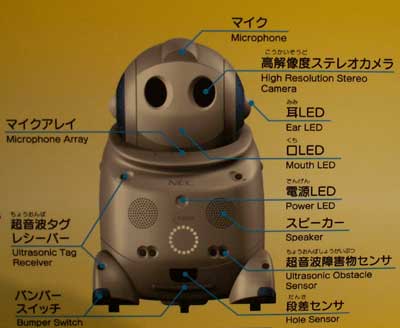
[写真8] チャイルドケアロボットPaPeRoのハードウェア
ロボットステーションにおけるパネル展示.子どもの相手をすることを考えて,衝突回避または衝突時の動作停止など,安全面での強化を図ったという.

[写真9] PaPeRoのデモンストレーションのようす
タッチ・センサからの信号に応じてLEDで表情を作る.例えば,頭をやさしくなでると照れて頬を赤らめたりする.また,目として搭載されているCCDカメラと背中に取り付けるカード型FOMAを用いて,一般のFOMA端末とテレビ電話通信が行える.今後,万博会場でもテレビ電話のデモンストレーションを行う予定.
このほか,頭に1個,襟元に7個の合計8個のマイクを搭載している.また,雑音を推定し除去するノイズ・キャンセラを利用して,音声認識の性能を高めている.さらに,100万画素程度の二つのCCDカメラを搭載している.これらを使って三角測量の原理で距離を測って適切な位置に移動したり,顔認識機能によって名まえを検索・照合できる.これらの処理はすべてメイン・ボードのCPUとソフトウェアで実現している.なお,こうした音声認識や顔認識などの基本的な機能モジュールを含めたロボット向けソフトウェア開発キット「RoboStudio」を,NECシステムテクノロジーが発売している.
ロボットそのものの製品化の時期は未定だが,応用分野を模索したり,製品化のための技術的な課題を解決しながら実用化していきたいという.


