国産ロケット開発組織がTOPPERS OSに注目 ――第6回 組込みシステム技術に関するサマーワークショップ(SWEST6)
2004年7月22日,静岡県浜松市にて,「第6回 組込みシステム技術に関するサマーワークショップ(SWEST6)」が開催された.基調講演を行った宇宙航空研究開発機構(JAXA) 総合技術研究本部 情報技術開発共同センター 副センター長の奥田一実氏は,ロケット打ち上げにかかわるソフトウェアの品質改善の一環として,TOPPERS OS(μITRON ver.4.0)をベースとした高信頼性リアルタイムOSの採用を検討していることを明らかにした(写真1).

[写真1] 講演する奥田一実氏(宇宙航空研究開発機構 総合技術研究本部 情報技術開発共同センター 副センター長)
講演のタイトルは「宇宙機とクリティカル・ソフトウェア」.
●ロケット搭載ソフトウェアとしてオープンなOSに期待
JAXAは,宇宙開発事業団(NASDA),宇宙科学研究所(ISAS),航空宇宙技術研究所(NAL)の三つが2003年10月に統合して発足した組織である.実際のロケットや搭載システムの開発はメーカに委託している.JAXAは納入された宇宙機搭載ソフトウェアについて,独立した専門グループによる検証と妥当性確認(IV&V:independent verification and validation)を行っている.これは,仕様どおり作られているかどうか,期待通りに動作するかどうかなどを確認するもので,とくにモデル検証などによる要求分析に重点を置いている.コストと人手がかかるので,クリティカルな部分(故障が起こったときにシステムを切り替える部分など)に絞ってIV&Vを実施している(写真2).コーディング基準については,MISRA-C(英国の自動車関連ソフトウェアの業界団体であるThe Motor Industry Software Reliability Associationが策定した,C言語によるコーディングのガイドライン)を参考に導入しているが,開発メーカにガイドラインを強制的に守らせるようなことはしていないという.
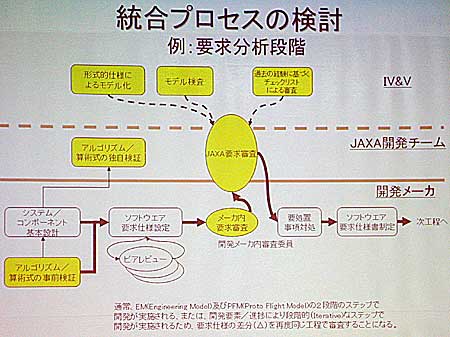
[写真2] 宇宙航空研究開発機構(JAXA)が実施しているIV&V
ソフトウェアの開発メーカで行う検証とは別に,JAXAの開発チームや独立した組織による検証・妥当性確認を行う.
また,宇宙用の高信頼性リアルタイムOSと開発環境の整備を進めており,TOPPERS OS(μITRON ver.4.0)の採用を検討している.JAXAは耐放射線性を持つCPU(MIPSアーキテクチャを採用した64ビットCPU.処理性能は200MIPS)をすでに開発しており,採用したOSはこのCPU上で動作することになる.OSとしては,これまで自作スケジューラやVxWorks,ITRONベースのOS(メーカ開発のサブセット版)などの利用を検討してきた.しかし,市販のリアルタイムOSはいざというときにすべての情報を迅速に入手するのが難しいので,ソース・コードなどが公開されたリアルタイムOSを採用したいと考えている.米国航空宇宙局(NASA)や欧州宇宙機関(ESA)でも,このようなオープンなOSを求める動きがあるという.
JAXAではH-IIAロケットの打ち上げ失敗が続き,その対策に追われていたが,2004年度の終わりに打ち上げの再開を予定している.
●GPS記録装置を搭載した模型ロケットの打ち上げ・計測実験を実施
また,SWEST6に合わせて,GPS(global positioning system)記録装置を搭載した模型ロケット「Hamana-1」の打ち上げと,飛行軌道のGPSデータを記録する実験が行われた(写真3).ロケットと搭載モジュール,発射制御装置,GPSデータ表示ソフトウェアなどのソフトウェア/ハードウェアの開発は,組込みソフトウェア管理者・技術者育成研究会(SESSAME)やSWEST実行委員会などから募った有志のメンバが行った.こちらは,高信頼性よりもロケットの軽量化が大きな課題となった.
Hamana-1の開発は,組み込みシステムとソフトウェアの開発技術力向上をめざして学習教材などを作成する計画(サーベイヤ計画)の一環として行われた.2005年のSWESTでは,ラジコンの電動飛行機で10~15分ほど飛行しながら生態系データを取ることを計画しているという.

[写真3] 模型ロケット「Hamana-1」の打ち上げ
Hamana-1は全長45cm,重量119g.JAXAのH-IIAロケットの約百万分の1の大きさである.搭載されたGPS記録装置の重さは38g(ケースを含む).地上の観測点における角度計の計測データから,到達高度は90~100m程度と算出された.


