連続発話の音声認識機能を備える2足歩行ロボットに人気が集まる ――ROBODEX2002
2002年3月28日~3月31日,パシフィコ横浜(神奈川県横浜市)において,人間との共存を目指したロボットの展示会「ROBODEX2002」が開催された.電機メーカや玩具メーカ,大学など28の企業・団体が展示を行った.連続発話の音声認識機能を備える2足歩行ロボットなど,アミューズメントを目的とした製品の展示には,つねに人だかりができていた.
●連続発話の音声認識機能を備える2足歩行ロボット
ソニーは,連続発話の音声認識機能を備えた2足歩行ロボット「SDR-4X」を展示した(写真1).SDR-4Xは,同社が2001年11月に発表した「SDR-3X」をもとに開発した.SDR-3Xでは,離散発話の音声認識機能しか備えていなかった.例えば,「青いカゴを持ってきて」ということばを認識させる場合,SDR-3Xでは「青い」,「カゴを」,「持って」,「きて」と単語ごとに認識させる必要があった.これに対して今回のSDR-4Xでは,一般的な会話の速度であれば,「青いカゴを持ってきて」という一文を認識できる.また,頭部に7個のマイクロホンを搭載している.これにより,音のする方向と話者を識別できる.
同社は,内蔵された加速度センサや角度センサ,力センサ(材料のひずみから力を計測するセンサ)などの情報をもとに,全身38ヵ所の関節部をリアルタイムに制御する「実時間統合適応制御(real-time integrated adaptive motion control)」の技術を開発した.また,各関節を駆動するアクチュエータの一部の出力を向上した.そのため,SDR-4Xはじゅうたんや畳の上の約10mmの凹凸の不整地や傾斜面10度の上り坂を歩行できる.また,軽い力で押しても転倒しないという.さらに,解像度が11万画素の1/5インチ型CCDカメラを二つ搭載しているので,被写体までの距離を検出することができる.その情報を利用して,障害物を避けた経路を自動的に算出する.
このほか,学習機能を備えており,最大10名までの人間の正面の顔を記憶/検出したり,楽譜データや歌詞データに合わせて歌を歌ったりする.
CPUとしては64ビットRISCプロセッサを二つ,メモリとしては64MバイトのDRAMを二つ搭載している.リアルタイムOSには同社独自の「Aperios」を,ロボット制御のアーキテクチャには,同社のAIBO(アイボ)と同じ「OPEN-R」を採用している.制御プログラムの供給には16Mバイトのメモリースティックを使用している.また,歩行速度は,水平・平たん路面のとき最大約20m/分,不整地路面のとき最大6m/分である.電源はリチウム・イオン2次電池で,約1時間の動作が可能である.外形寸法は580mm×260mm×190mm,質量は6.5kg(電源,メモリ搭載時).
まだ開発の途中ということで,今回のデモンストレーションにおいても,正しくことばを認識できないことや顔を記憶できないことがあった.同社は,2002年度中に製品化に関する発表を行う予定.

[写真1] SDR-4の歩行デモンストレーション
●地雷を探知するロボット
千葉大学工学部電子機械工学科の野波研究室は,地雷を探知するロボット「COMET-II」を展示した(写真2).本ロボットは,6脚歩行のロボットである.脚とは別に地雷センサと地雷の場所に目印を付ける腕を持っている.目印を付ける腕は草刈り用の装置に替えることもできる.
本ロボットは,地雷センサが搭載された腕を左右に動かして地雷が埋まっている場所を探しだす.センサは円形で,中心部に地中レーダ(GPR)が,外縁部に金属探知機(ECT)が配置されている.地中レーダと金属探知機の両方を利用して,地雷を探知する.現在,4種類の地雷があるとされており,種類ごとに本ロボットの探知率は異なる.本ロボットの4種類の地雷の探知率は平均93.5%である.探知できる深さは約1m,歩行速度は時速150m,1時間当たり探知できる面積は約300m2.また,探知された地雷についてGPS(Global Positioning Systems)機能を用いて±2cmの精度で位置データを作成する.このデータを利用して,進行方向の地雷原が安全か危険かを区別し,安全な場所にのみロボットの脚を着地させる.
本ロボットの電源には,ガソリン・エンジンで駆動する直流発電機を搭載している.連続使用できる時間は約2時間である.CCDカメラと赤外線カメラ,力センサ,無線機などを搭載している.外形寸法は200cm×120cm×60cm(全長×全幅×高さ).総重量は120kg.
現在は,COMET-IIの要素技術をもとに新しい地雷探知ロボット「COMET-III」の研究を行っている.油圧駆動方式を用いており,6脚歩行とクローラ(無限軌道)走行を併用して作業を行う.6脚歩行時の速度は時速600m.クローラ走行時の速度は時速10kmである.1時間当たり探知できる面積は1800m2.外形寸法は400cm×180cm×100cm.総重量は800kg.COMET-IIIでは,センサを改良して探知率を向上させる予定.また,8時間連続して使用できるように電源などを改善していくという.早ければ2002年度中にアフガニスタンにおいて地雷探知のフィールド・テストを行う.
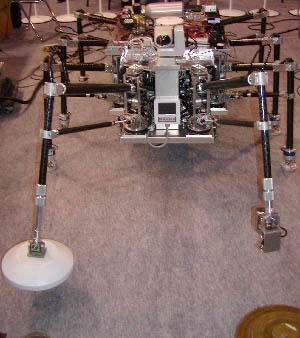
写真2] COMET‐IIの外観
●ハードなどのアーキテクチャを公開したロボット
富士通オートメーションは,ハードウェアやソフトウェアのアーキテクチャなどを公開した2足歩行ロボット「HOAP(humanoid for open architecture platform)-1」を展示した(写真3).
本ロボットには,力学計算・表示の行えるシミュレータが用意されている.このシミュレータは,同社と東京大学の中村仁彦教授が共同で開発した.このシミュレータの一部は,経済産業省のプロジェクト「人間協調・共存型ロボット・システムの開発」の成果を利用している.CPUには米国Intel社のPentiumIII(動作周波数700MHz)を,OSには,リアルタイムLinuxを採用している.USB1.1に準拠したインターフェースを備えている.27万画素の1/3インチ型CCDカメラを二つ搭載している.全長は48cm,重量は6kgである.
これとは別に,オプションとして,24Vのニッケル・マンガン水素2次電池と専用充電器,IEEE802.11bの無線LANに対応したデータ無線機を用意している.また,増設用の基板として,モータ制御用とセンサ処理用の基板を用意している.
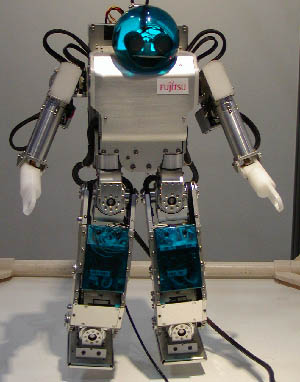
[写真3] HOPAの外観
●回転寿命が100万回の位置センサ
村田製作所は,100万回の回転寿命を保証する有接点型ロータリ・ポジション・センサを展示した(写真4).ペット・ロボットの関節の角度検出やエアコンのダンパの角度検出などに使われる.
本センサは,回転角度に比例してセンサの抵抗値が変化する.これによって,回転角度をセンサの出力電圧として検出できる.回転角度と出力電圧の関係が直線に近いほど,検出の精度は高い.本センサの直線性誤差は±2%である.回転トルクは27mN・m.電源電圧は最大5Vである.電気的な有効回転角度は333度(参考値).外形寸法は12.0mm×11.0mm×2.1mmである.
同社は,2001年10月2日~10月6日に開催されたCEATEC JAPAN2001(千葉県幕張市)で,同社のBluetoothモジュールを搭載したロボットの遠隔操作のデモンストレーションを行った.同社は,ロボット産業について成長の期待できる市場と位置づけている.

[写真4] ロータリ・ポジション・センナの外観


