[ keyword: 制御 ]
エプソン,リチウム・ポリマ2次電池を内蔵した手のひらサイズの飛翔ロボットを開発
ニュース 2004年8月19日
セイコーエプソンは,手のひらサイズの飛翔ロボット「μFR-II」を開発した.ロボットの重さは電池を含めて12.3g(電池を除くと8.6g).手動で操縦できるほか,あらかじめプログラムした飛行経路に沿って自動運転させることもできる.
μFR-IIは,2003年11月に同社が発表した飛翔ロボット「μFR」の後継機にあたる.μFRは電池を搭載せず,電源ケーブルを必要としていた.一方,μFR-IIは電池を搭載している.開発にあたっては機体の軽量化と揚力の向上が重要な課題となった.同社が開発した5.0mm×3.2mm×1.3mmの小型ジャイロ・センサ「XV-3500CB」の採用や高密度実装により,小型化・軽量化をはかった.また,回転翼を駆動する超音波モータのパワー・ウェイト・レシオを1W/gに引き上げるなどして,揚力を30%向上させた.その結果,最大約17g・fの揚力が得られた.連続飛行可能時間は約3分.
本ロボットは二つの超音波モータを使い,二つの回転翼をそれぞれ逆方向に回転させることで,揚力を発生させながら機体の回転を防いでいる.また,2軸のリニア・アクチュエータによる重心移動により,水平移動と姿勢制御を行う.操縦はBluetooth経由で行う.CPUは同社の32ビット・マイコン「S1C33」など2個を使用した.このほか,CMOSカメラ,2個のLED,リチウム・ポリマ2次電池,自律飛行のための位置検出用マーカなどを搭載している.搭載した部品点数は563点.「専門家が,『この程度の機能を搭載すればこのくらいの重さになるだろう』と予測する値の1/10程度にすることができた」(同社 研究開発本部 開発企画知財推進部 課長の宮澤 修氏).
自動操縦の場合,地面に固定したCCDカメラでμFR-IIの底面についている位置検出用マーカ(白い板)を監視し,撮影したマーカの大きさや形状をもとにμFR-IIの位置を計算する.そして,検出した位置情報をもとに制御信号をBluetooth経由でμFR-IIに送信する.制御プログラムは共同開発を行っている千葉大学が設計した.
μFR-IIは,人間が入っていけないような狭い場所や危険な場所に行き,情報を収集する(センシングする)ことを目的に開発された.「小型化はトンボの大きさくらい,重さにして3gくらいが限界と考えている.あまり小さくすると風の影響が大きくなり,自律飛行できなくなる.ホバリング(空中停止飛行)も滑空もできるオニヤンマのようなロボットの実現を目指している」(宮澤氏).機体が軽いので,落下しても周囲に被害を及ぼさず,自らも壊れないのが利点という.
2004年8月17日,μFR-IIの公開テスト飛行が東京都内で行われた.制御サーバ用のパソコンが壊れるというアクシデントがあり,急きょ立ち上げた代理のサーバでテスト飛行を行った.手動操縦による飛行には成功したが,自動運転による飛行はBluetooth通信が切れたり,超音波モータや電池の消耗が原因と思われるトラブルが発生し,成功には至らなかった.
現状のμFR-IIは,室内の空調程度の風でも飛行が不安定になる.2年以内をめどに,この問題を解決する予定.なお,μFR-IIはプロトタイプであり,外販される予定はない.

[図1] μFRシリーズの近未来のイメージ その1(目的地の近くまでは母船で移動し,母船を介してμFRを制御する)

[図2] μFRシリーズの近未来のイメージ その2(人間が入っていけない場所に複数のμFRをばらまき,いっせいに情報を収集させる)
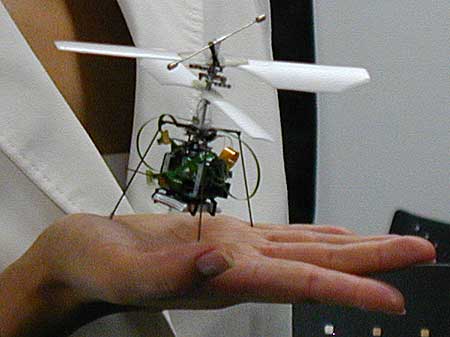
[写真1] μFR-IIの外観
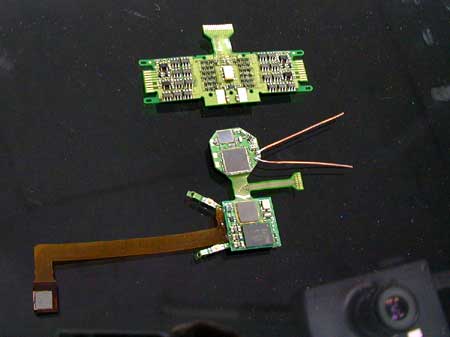
[写真2] 搭載基板(上の基板の中央に見えるのがジャイロ・センサ.下の基板の,左端にあるのがCMOSカメラ,中央右にあるのがBluetoothのアンテナ)

[写真3] テスト飛行のようす(手動操縦から自動運転に切り替えたところ)
■連絡先 |


