 |
JASA賞に選ばれた「猫飯」のモデル(一部).Zクランクやショートカット,坂道,ドルフィン・ジャンプ(オリジナル・ショートカット)のそれぞれをどのように走破するかを,UMLのアクティビティ図を用いて説明している.
|
 |
競技会2日目に開催された審査ワークショップのようす.350人ほどが参加した.
|
 |
審査委員長を務めるオージス総研 渡辺博之氏による講評.モデルと性能の相関は今年も明らかにならなかった.
|
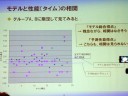 |
1回でも完走したチームに限定してモデルと性能の相関を見てみたが,やはり相関はみられない.今年から追加された審査基準「予測性能」の得点だけに絞ってみても,やはり相関はみられなかった.
|
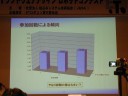 |
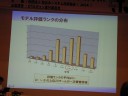
ETロボコンの参加回数ごとのモデルの平均点を示した図.参加回数が多いチームのほうが平均点が高い.
|
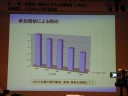 |
参加資格によるモデル得点の傾向を示した図.企業チームとして参加したチームのモデルの平均点がもっとも高かった.
|
 |
モデル評価ランクの分布図.
|
 |
審査委員を務めるリコー 幸加木 哲治氏によるプレゼンテーション.今年はUML表記以外の図解や画像によってモデルがわかりやすくなっていたものが多かったという.
|
 |
画像を使った例として示された,チーム「サヌック」のモデル.Zクランクの走破方法を,写真や拡大図を使ってていねいに説明している.「サヌック」によると,考えなくてもすっと頭に入ってくるようなモデルを心がけたという.
|
 |
モデルは成熟してきており,王道としてのモデル・パターンが定着してきたという.しかしそれでは審査する側がワクワクしないので,来年は審査委員のモチベーションを高めるようなモデルや,技術のブレークスルーが見えるモデルを期待している.これは,例として示された,昨年(ETロボコン2005)におけるチーム「D@CHASER」のモデル(一部).チームと周囲の関係を,UMLモデルを用いて示している.
|
 |
審査委員のモチベーションを高めるモデルの例として示された,昨年(ETロボコン2005)のチーム「D@CHASER」のモデル(一部).チーム・メンバの役割と制御ソフトウェアのクラス図を重ね合わせ,ユーモアたっぷりに図解している.
|
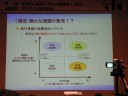 |
これまでのETロボコンにおいては,高速に走行でき,ショートカットなどを通過して高得点を挙げられるロボットが「性能が良い」と考えられていた.今回の競技会においては環境変化に対応できたチームが完走し,競技部門で高得点を挙げた.これにより,来年からは「信頼性(いかに柔軟・迅速に環境変化に対応するか)」が性能を語るうえで注目されることとなった.
|



