 |
スタート直後の飛行船の位置が悪かった可能性を考慮し,試しに,再度出発地点から競技エリア内に飛行船を押し出してみる(これは採点対象外のデモンストレーション飛行として扱われる).すると飛行船は,そのままふわりと着陸地点の方へ….ただし,これは自律飛行の結果ではなく,たまたま押し出した方向が着陸地点に向いていただけのようだ.
|
 |
なかなか良い感じで飛行している(ように見える),模型飛行船.
|
 |
モニタの表示を見ながらコメントする審査委員の佐藤 啓太氏(デンソー).やはり,飛行船の位置は取得できていなかったようだ.チーム・メンバによると,4点の超音波センサから情報を得て飛行船の位置を算出するプログラムにしていたため,ある程度上昇して高度を稼がないとXY座標が取れないのだという.「試走会では超音波センサが80cm間隔で配置されていたから問題なかったのに…」と悔しさをにじませていた(ただし,超音波センサの配置状況については,事前に参加チームに告知されていたようだ).
|
 |
チーム「新横AirShip2007」(情報科学専門学校新横浜校)の航法飛行競技.システムの処理性能を向上させるため,3台のノート・パソコンを使って分散制御するという.
|
 |
パソコンが多いと,設定にも時間がかかるようだ.
|
 |
審査委員の佐藤氏から,「分散制御にしたせいで,かえって処理が複雑になったのでは?」と質問が出る.
|
 |
運営委員長の久保秋 真氏(アフレル)は,「学生の教育という意味では,役割分担や責任範囲が明確になる分散制御は良かったのではないか」とコメントした.
|
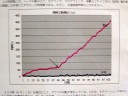 |
MDDロボットチャレンジ2007では,ソフトウェア審査の一環として,開発に取得したメトリックの内容とその分析の提出を義務づけていた.これはチーム「新横AirShip2007」が提出したグラフであり,開発にかけた時間数の推移(累計)を表している.本番の約2カ月前からグラフの勾配が変化している.チームの士気が低迷していることに危機感を感じて,メンバを入れ替え,チームを立て直したのだという.ただし,「順調に作業量は増えていったが,やり残していることが多かった」そうだ(同チームの発表資料より).
|
 |
競技開始.離陸し,天井高く浮上する飛行船.その後,赤い風船(立ち寄り点;Way Point)を通過したが,着地には至らなかった.同チームによると,事前調整の時点で飛行船が浮上しないことを警戒し,なるべく飛行船を浮かせるように調整したという.
|
 |
チーム「電大非行船」(東京電機大学)の航法飛行競技.審査委員からは,「飛行船の動作を緻密に分析していたことは評価できるが,UMLなどの標準表記がなかったのが残念」とコメントが.
|
 |
離陸後,本来目指すべき方向とは別のほうに飛んでいき,着地してしまった.モニタ表示を見ると,飛行船の現在位置はしっかり把握できている様子.
|
 |
制御が左右逆なのではないか? という意見が出た.念のため,再度,デモンストレーション飛行(採点対象外)を行う.今度は,飛行船は赤い風船めざしてまっすぐ進んだ.
|



