 |
2007年10月19日,日本科学未来館(東京都江東区)において,模型飛行船を自動制御するコンテスト「第4回 MDD(model driven development;モデル駆動開発)ロボットチャレンジ」が開催された.
|
 |
床面には,飛行船の位置を把握するための超音波センサが格子状に配置されている.飛行船が発した超音波をこれらのセンサが拾い,パソコンで飛行船の位置を算出する.位置を算出するプログラムは各チームが開発する.
|
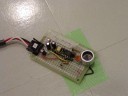 |
床に配置された超音波センサ・ボードの一つ.
|
 |
超音波センサからの情報を集約するボード.
|
 |
写真左が,MDDロボットチャレンジ 実行委員長の二上 貴夫氏(東陽テクニカ).写真右が,情報処理推進機構 ソフトウェア・エンジニアリング・センター(IPA/SEC)の猪狩 秀夫氏.
|
 |
午前は規定飛行(compulsory flight)競技が行われた.これは,垂直飛行,水平飛行,回転,停止などといった飛行船の基礎的な動作を確認するものである.午後は航法飛行(navigation flight)競技が行われた.これは,出発地から離陸して,立ち寄り点を通過しながら目的地に着陸するように自律飛行させるものである.参加チームの控え室では,各チームとも,システムの調整に余念がない.
|
 |
チーム「第百壱空挺師団」(東海大学)の航法飛行競技が始まる.同チームによると,タイマで自動飛行させることを予定していたが,スケジュール管理がうまくいかず,予定していた仕組みを実装できなかったという.
|
 |
競技開始.しかし,床面の出発地点からほとんど浮上できないまま終わってしまった.モータの出力が弱すぎたとのこと.
|
 |
チーム「TNT(たかく ながく とべ)」(日本大学)の航法飛行競技.Javaで実装した唯一のチームということで,審査委員の佐藤 啓太氏(デンソー)から「組み込みシステム開発にはあまり使われていないJavaを,なぜ選んだの?」などの質問が飛ぶ.
|
 |
審査委員の質問攻撃にたじたじとなりながらも,回答するチーム・メンバ.「先生が,Javaでやると面白いんじゃない? と言ったので…」.正直な答えである.
|
 |
審査委員の太田 寛氏(マイクロソフト)のコメント.「言語も開発環境も,いろいろ試してみるのは良いと思う.でも,何でそれを選ぶのか,などの設計思想はきちんと持っていてほしい」.
|
 |
スタート直後,なぜか飛行船は観客席の方に流れていってしまった.スクリーンに投影されている飛行経過のモニタ表示を見ると,床面の超音波センサ・ボードから取得できるはずの飛行船の位置(X座標とY座標)が取得できていない.
なお,飛行経過のモニタ表示のプログラムも,参加チームがそれぞれ開発したものである.
|



