●そしてレース!
そしてレースです.練習では調子がよかったチームもなぜか完走できなかったりする中,わがEチームの「赤い魚号」は,みごと2回とも完走.「(練習ではあんなにコース・アウトしていたのに)本番に強いですね」というほめ言葉(?)をいただき,なんと準優勝を果たしました(写真12).
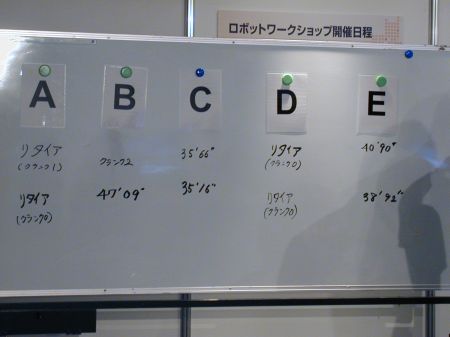
[写真12] レース結果
5チームのうち,完走したのは3チームだけ.それも,プログラミングの上手下手というより,運のあるなしだったような気もしますが….
Cチームはきれいな走りで2回とも完走,優勝しました.プログラムのどこを変えたのかをうかがうと,
「全体の速度を上げて,直角カーブの手前の2重線を過ぎたらいっそう減速するようにしただけです」
とのことでした.最初はあまりうまく走らなかったけれども,後半で調子が良くなってきたそうです.そう言えば,途中で部屋の明るさも変わっていますし(最初はライトが明るすぎてコースに反射していたとのことで,その後,先生がスポット・ライトを消した),電池の電圧も初めて使うときは不安定だけれど使っているうちに安定してくるそうなので,条件は時々刻々と変わっていたわけです.
滝田先生によると,マイコン・カーを走らせるときは,次のようなことを考えておくべきだそうです.
- 直線とカーブで走行スピードを変えること
- 車の形状(速く走るためには,重心を下げてタイヤを大きくする.F1の車と同じ)
- センサを白線から離さないこと(直線コースをいかにゆれずに走るか)
- タイヤの状態(ゴミがついていないかなど)
特に,「センサを対象から離さない」ためにはタイヤの角度調整が重要だそうです.今回製作したマイコン・カーは左右のタイヤの回転数を変えることによってカーブを曲がる方式のものですが,なるべくコースから外れないためには,実車と同じように操舵方式(進行方向に対するタイヤの角度を調整する方式)にしないと,ちょうど良いタイミングで曲がることができません.
滝田先生は,センサ・アームの長さとホイール・ベース(前輪から後輪までの長さ)を1:1に,進行方向に対するセンサの角度とタイヤの角度を2:1にすれば,トレースしているコースを外れずに走れることを発見しました(写真13,この理論「SSM(Sensor Steering Mechanism)」は学会でも発表されています※).1999年にマイコン・カー・ラリーで優勝したのはこの方式を採用したためのようです.
※滝田好宏,「SSMを用いた軌道誘導車両の高速化」,『日本機械学会論文集 65巻630号C編』,1999年2月.
滝田好宏,「SSMを用いた軌道誘導車両の高速旋回特性」,『日本機械学会論文集 66巻652号C編』,2000年12月.
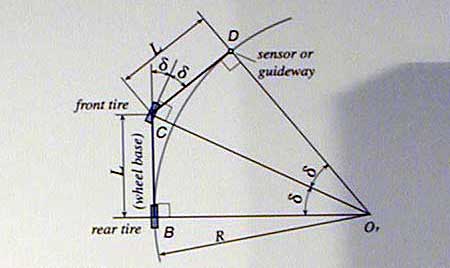
(a) SSMの概念 |
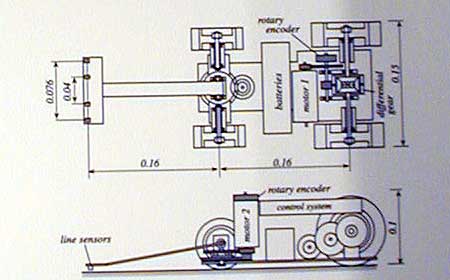
(b) SSMに基づいて設計された車
|
[写真13] SSMを解説したパネル
(b)に示された車は,1999年にマイコン・カー・ラリー大会 一般の部で優勝したそうです.
今回のプログラミングはGUIベースでしたが,それでは滝田先生は何でプログラミングされているのでしょうか?
「C言語です」
「アセンブリ言語で組んでも,速くなりませんか?」
「ならないでしょうね,たぶん.ソースがわかりにくくなるだけじゃないでしょうか(笑)」
それでは,いちばん聞きたかった質問を….
「勝負は時の運,というところはありますか?」
「いえ,百発百中で走れるようにして持っていくものです」
…確かに,そうですよね.
「それと,本番ではつい速く走らせようと思ってしまうのですが,1回目はまず確実に走りきれる速度でタイムを確保することが重要です.マイコン・カー・ラリーでは2回走って良いほうのタイムを採りますから,1回目をちゃんと押さえておけば,2回目はもっと性能を上げてチャレンジできますから」
なるほど.おっしゃるとおりです.
|