参加したチーム5組のほとんどは親子連れ.かく言うわたしも親子3人で参加したのですが,ぐずる子供は相棒にまかせて,わたしは一人でいそいそと組み立てていました(だって,これもシゴトですから!).そんなこんなで,いちばんに組み立てを終えました.
●プログラミングで腕をふるう…はずが…
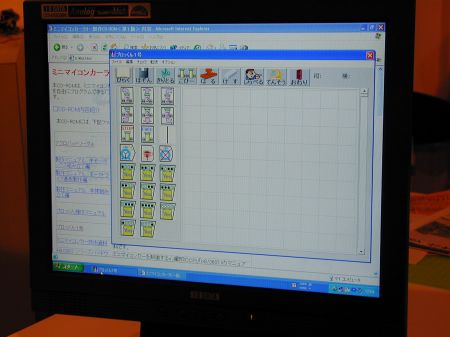
さて,プログラミングは? こちらも,GUIでプログラミングできるツールが用意されていました(写真6).アイコンを選択して,ループや条件分岐などを組み立てていくようです.さて,どうやるのでしょう?
[写真6] マイコン・カー搭載用プログラムの開発環境
GUIベースなのでかんたんそうです.でも,どうやるの?
「実は,サンプル・プログラムを用意しておきましたので,まずそれをマイコンのほうにダウンロードしてみてください」.
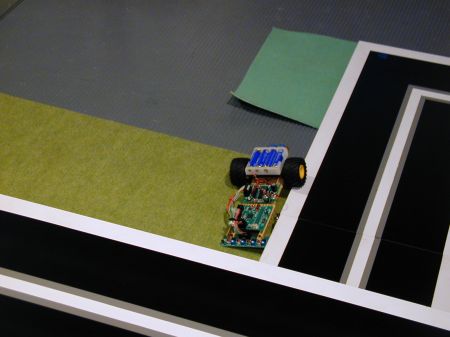
ふむふむ.あらかじめ用意された構成ファイルを開き,RS-232-Cケーブルでマイコンに転送します.さて,走らせてみると…ちゃんとコースに沿って走っています! おぉぉぉ〜.何も特別なことはしていないのですが,感動なのでした.(写真7)
[写真7] サンプル・プログラムに従って走るマイコン・カー
白線に沿って快調に走っているのを見るだけで,なんだかすごいものを作り上げたような気がします.
しかし,直角カーブを曲がるところでコース・アウト.うーん・・・ 修正が必要でしょうか(写真8).直角カーブにさしかかる少し手前のコースの箇所に,コースと垂直に2本線が引いてあるのですが,そこでの減速が足りないようです(写真9).
[写真8] 曲がりきれずにコース・アウト
あらら….やはり,サンプル・プログラムは完全ではなかったようです.
[写真9] コースを客観的に眺めたようす
どうやら,コースのポイントはこの直角カーブと手前の2重線にあるらしい.
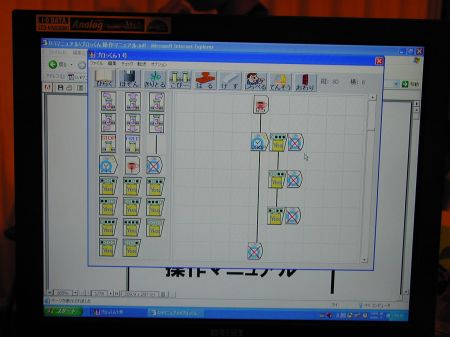
開発環境のGUIソースを確認します(写真10).まずは全体的にスピードを抑えて走ってみましょうか(珍しく安定志向の選択をしたわたし).それから,2本線を検出しているところを探して,と……どこ? それに,ここのループはどういう意味なんだろう? え? え? わたし,どこを変更したんだっけ?
……ソースをぐちゃぐちゃにいじりすぎてわけがわからなくなり,
「また,元のソースを読み込んでやり直してみよう…」
ふりだしに戻りました.
[写真10] GUIだと,かえってわけがわからない(負け惜しみ)
GUIベースでもスパゲッティ….
とりあえず,いじる場所は最小限にして,もう一度プログラムをマイコンに転送してみます.え? やっぱり同じところでコース・アウトしてしまう? …いったい,どうすればいいのでしょう?
マイコン・カーの動きをよく見てみると,2本線のところで減速する場合としない場合があります.また,直角カーブを曲がった後にまた通常の速度で走り出す場合と,減速から復帰できずにのろのろとセンシングする場合があります.のろのろとセンシングしている場合,決まって次の2本線のところで直角カーブと勘違いし,コース・アウトしてしまうのです.同じプログラムでも,動きが違うのです.いったい,何で? ソースにどこか見落としがあるの?
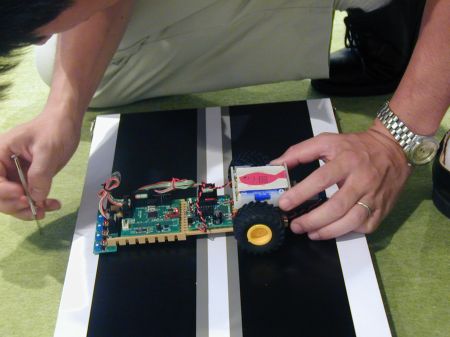
そんなこんなで休憩時間も惜しんでGUIと格闘しているうちに,センサの調整をしていた相棒から「おーい,1周完走したよ!」の声(写真11).
「プログラム(ソフトウェア)をいじるよりまずセンサ(ハードウェア)をいじったほうがいい,ということはよくあるんです」と先生.よし! 今ちゃんと走っているなら,もうこれ以上プログラムをいじるのをやめよう! …おまけに,そろそろ時間切れです.
[写真11] センサ調整を受ける,わがチームの「赤い魚号」
部屋の明るさによっても白線の認識のしきい値が変わるセンサの調整は,微妙な作業です.
念のため,もう一度走らせてみると,あれ? やはりコース・アウトです.これは,運を天にまかせて走らせるしかありません.
|